Introduction: PyTorchInspector, Lenses and Visualizers#
Abstract#
In this notebook we will introduce PyTorchInspector class, a gate to
monitorch, lens classes, that are responsible for data collection and
preprocessing, and visualizers. We will teach several networks for
classification on tabular dataset.
Imports and Dataset#
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
from torch.utils.data import DataLoader, TensorDataset
from sklearn import datasets
from sklearn.model_selection import train_test_split
RND_SEED = 42
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
device
device(type='cpu')
We will train our neural net on UCI ML Wine Data Set. Our task is to show librairy’s functionality, thus we will treat all 13 numerical features as being anonymized, we also will not create test set to check our model, as there is no need for that. Nevertheless, we will display five samples from the dataset to see how a row might look.
wine_dataset = datasets.load_wine()
Xtrain, Xval, ytrain, yval = train_test_split(
wine_dataset['data'], wine_dataset['target'],
random_state=RND_SEED, shuffle=True, test_size=0.2
)
BATCH_SIZE = 8
train_dataloader = DataLoader(
TensorDataset(
torch.from_numpy(Xtrain).float(), torch.from_numpy(ytrain).long()
),
shuffle=True, batch_size=BATCH_SIZE
)
val_dataloader = DataLoader(
TensorDataset(
torch.from_numpy(Xval).float(), torch.from_numpy(yval).long()
),
shuffle=True, batch_size=BATCH_SIZE
)
pd.DataFrame(
np.concat([wine_dataset['data'], wine_dataset['target'].reshape(-1, 1)], axis=1)
).sample(5, random_state=RND_SEED).rename(columns={i:f'X{i}' for i in range(13)}).rename(columns={13:'target'})
| X0 | X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 | X11 | X12 | target | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 19 | 13.64 | 3.10 | 2.56 | 15.2 | 116.0 | 2.70 | 3.03 | 0.17 | 1.66 | 5.10 | 0.96 | 3.36 | 845.0 | 0.0 |
| 45 | 14.21 | 4.04 | 2.44 | 18.9 | 111.0 | 2.85 | 2.65 | 0.30 | 1.25 | 5.24 | 0.87 | 3.33 | 1080.0 | 0.0 |
| 140 | 12.93 | 2.81 | 2.70 | 21.0 | 96.0 | 1.54 | 0.50 | 0.53 | 0.75 | 4.60 | 0.77 | 2.31 | 600.0 | 2.0 |
| 30 | 13.73 | 1.50 | 2.70 | 22.5 | 101.0 | 3.00 | 3.25 | 0.29 | 2.38 | 5.70 | 1.19 | 2.71 | 1285.0 | 0.0 |
| 67 | 12.37 | 1.17 | 1.92 | 19.6 | 78.0 | 2.11 | 2.00 | 0.27 | 1.04 | 4.68 | 1.12 | 3.48 | 510.0 | 1.0 |
Neural Net Definition#
We will define a simple neural net for our task, it will include three hidden layers with ReLU activations and a softmax output. We will allow a custom probability dropout between the second and the third layers. We will also define functions to train and validate one epoch.
from collections import OrderedDict
class SimpleMLP(nn.Module):
def __init__(self, dropout_p=0):
super().__init__()
self.net = nn.Sequential(OrderedDict([
('lin1', nn.Linear(13, 32)),
('relu1', nn.ReLU()),
('lin2', nn.Linear(32, 32)),
('relu2', nn.ReLU()),
('dropout', nn.Dropout(dropout_p)),
('lin3', nn.Linear(32, 16)),
('relu3', nn.ReLU()),
('lin4', nn.Linear(16, 3)),
('softmax', nn.Softmax(dim=1)),
]))
def forward(self, X):
return self.net(X)
@torch.no_grad
def predict(self, X):
return self.net(X).argmax(dim=1)
def train_one_epoch(model, loss_fn, optimizer, train_dataloader=train_dataloader):
""" Trains model through dataset one time. Returns mean loss accross batches. """
loss_agg = 0
for data, label in train_dataloader:
optimizer.zero_grad()
pred = model(data)
loss = loss_fn(pred, label)
loss.backward()
optimizer.step()
loss_agg += loss.item()
train_n_samples = train_dataloader.dataset.tensors[0].shape[0]
return loss_agg / train_n_samples
@torch.no_grad
def validate_one_epoch(model, loss_fn, val_dataloader=val_dataloader):
""" Validates through given dataset, returns accuracy and mean loss accross batches. """
correctly_classified = 0
loss_agg = 0
for data, label in val_dataloader:
pred = model(data)
loss = loss_fn(pred, label)
correctly_classified += pred.argmax(dim=1).eq(label).float().sum().item()
loss_agg += loss.item()
val_n_samples = val_dataloader.dataset.tensors[0].shape[0]
return correctly_classified / val_n_samples, loss_agg / val_n_samples
Inspector Definition#
Monitorch uses built-in PyTorch hooks to collect training data, classes
from monitorch.lens manage callbacks and data flow, they can be
customized using initialization flags to serve your needs. Classes from
monitorch.visualizer are responsible for communication between
lenses and visualization libraries such as Matplotlib and TensorBoard.
PyTorchInspector is a class that connects visualizer, lenses and
user-defined PyTorch modules. Almost all of the configuration is done
through inspector.
To start one needs to provide list of lenses, in this notebook we will
use LossMetrics, OutputActivation and ParameterNorm lenses;
they will be discussed in detail in later notebooks, for our goal it is
sufficient to note that LossMetrics automatically collects loss
data, if provided loss function, while OutputActivation and
ParameterNorm collect per layer data during training.
PyTorchInspector allows to define visualizer from the very start,
one can choose any object of concrete subclass of
AbstractVisualizer, or provide string 'matplotlib',
'tensorboard' or 'print'. Default is 'matplotlib'.
PyTorchInspector also collects layers from neural net, use depth
initialization parameter to control what layers should be displayed.
Default is to traverse until module does not contain any submodules.
Further inspector configuration can be found at the dedicated documentation page.
from monitorch.inspector import PyTorchInspector
from monitorch.lens import LossMetrics, OutputActivation, ParameterGradientGeometry
loss_fn = nn.CrossEntropyLoss()
inspector = PyTorchInspector(
lenses = [
LossMetrics(
loss_fn=loss_fn,
loss_fn_inplace=False,
loss_range='Q1-Q3'
),
OutputActivation(),
ParameterGradientGeometry(compute_adj_prod=False)
]
)
Base Usage#
To use predefined inspector, one needs to attach the inspector to the
module, then proceed to training as they do usually. At the end of each
epoch inspector must be signaled about an end of an epoch using
tick_epoch(). That is it! No more additional steps are need to
collect data.
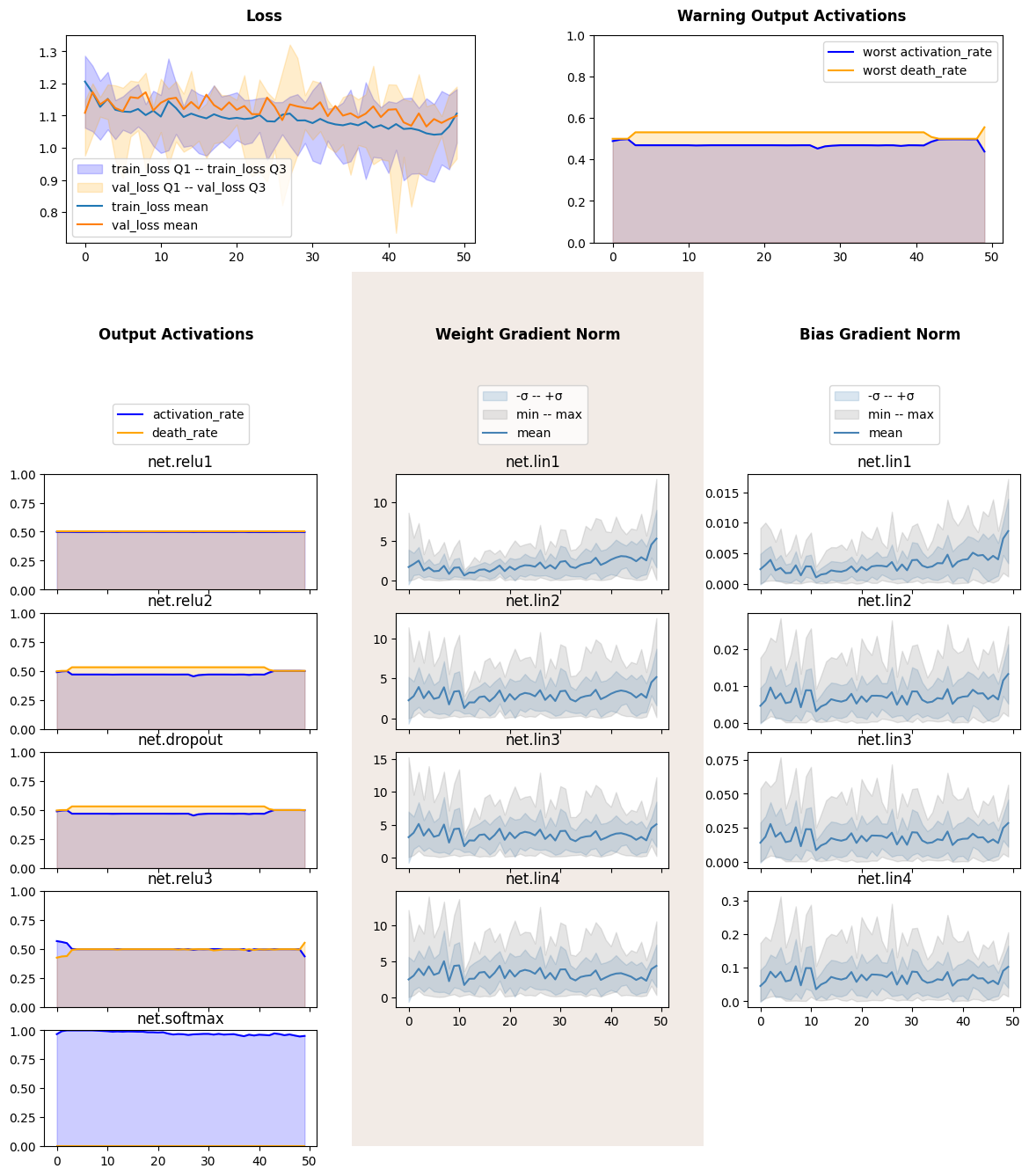
Matplotlib visualizer also requires calling show_fig() to draw
plots. Other visualizers draw plots online.
model = SimpleMLP()
optimizer = torch.optim.Adam(
model.parameters(),
lr=0.0005
)
inspector.attach(model)
N_EPOCHS = 50
for epoch in range(N_EPOCHS):
train_one_epoch(model, loss_fn, optimizer)
validate_one_epoch(model, loss_fn)
inspector.tick_epoch()
fig = inspector.visualizer.show_fig()
Detach-Attach#
One of the main reasons, why we plot data about neural networks, is to
compare them between each other. For that PyTorchInspector is
capable to detach and attach to a module, therefore allowing itself to
be reused without polluting code with reinitialization.
We will create a new model with destructive dropout and inspect it with
the very same object. Pay attention to activation of net.relu3.
model = SimpleMLP(dropout_p=0.5)
optimizer = torch.optim.Adam(
model.parameters(),
lr=0.001
)
inspector.attach(model)
N_EPOCHS = 50
for epoch in range(N_EPOCHS):
train_one_epoch(model, loss_fn, optimizer)
acc, loss = validate_one_epoch(model, loss_fn)
inspector.tick_epoch()
fig = inspector.visualizer.show_fig()
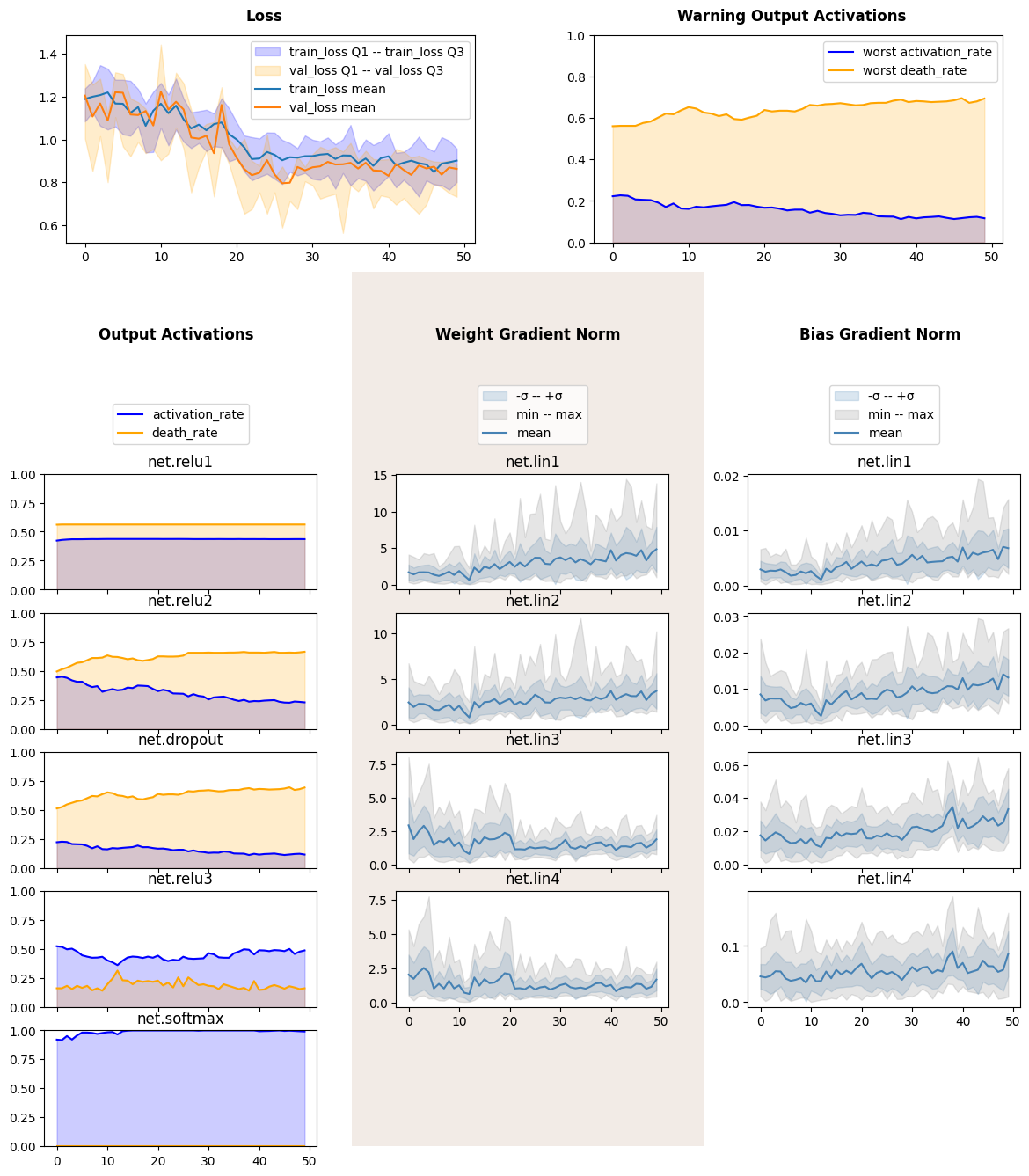
We see that death rate was a lot smaller and weight gradient of corresponding linear layer was more stable.
Hot-Swapping Visualizer#
Due to modular structure of PyTorchInspector visualizer can be
replaced by more appropriate tool. To illustrate it we will use
TensorBoardVisualizer on the inspector.
from monitorch.visualizer import TensorBoardVisualizer
inspector.detach().visualizer = TensorBoardVisualizer()
model = SimpleMLP(dropout_p=0.5)
optimizer = torch.optim.Adam(
model.parameters(),
lr=0.0005
)
inspector.attach(model)
N_EPOCHS = 50
for epoch in range(N_EPOCHS):
train_one_epoch(model, loss_fn, optimizer)
acc, loss = validate_one_epoch(model, loss_fn)
inspector.tick_epoch()
Code above will generate data displayable by Tensorboard like a picture
below. One could view tensorboard in the notebook using jupyter magics
like %load_ext and %tensorboard --logdir='runs'.
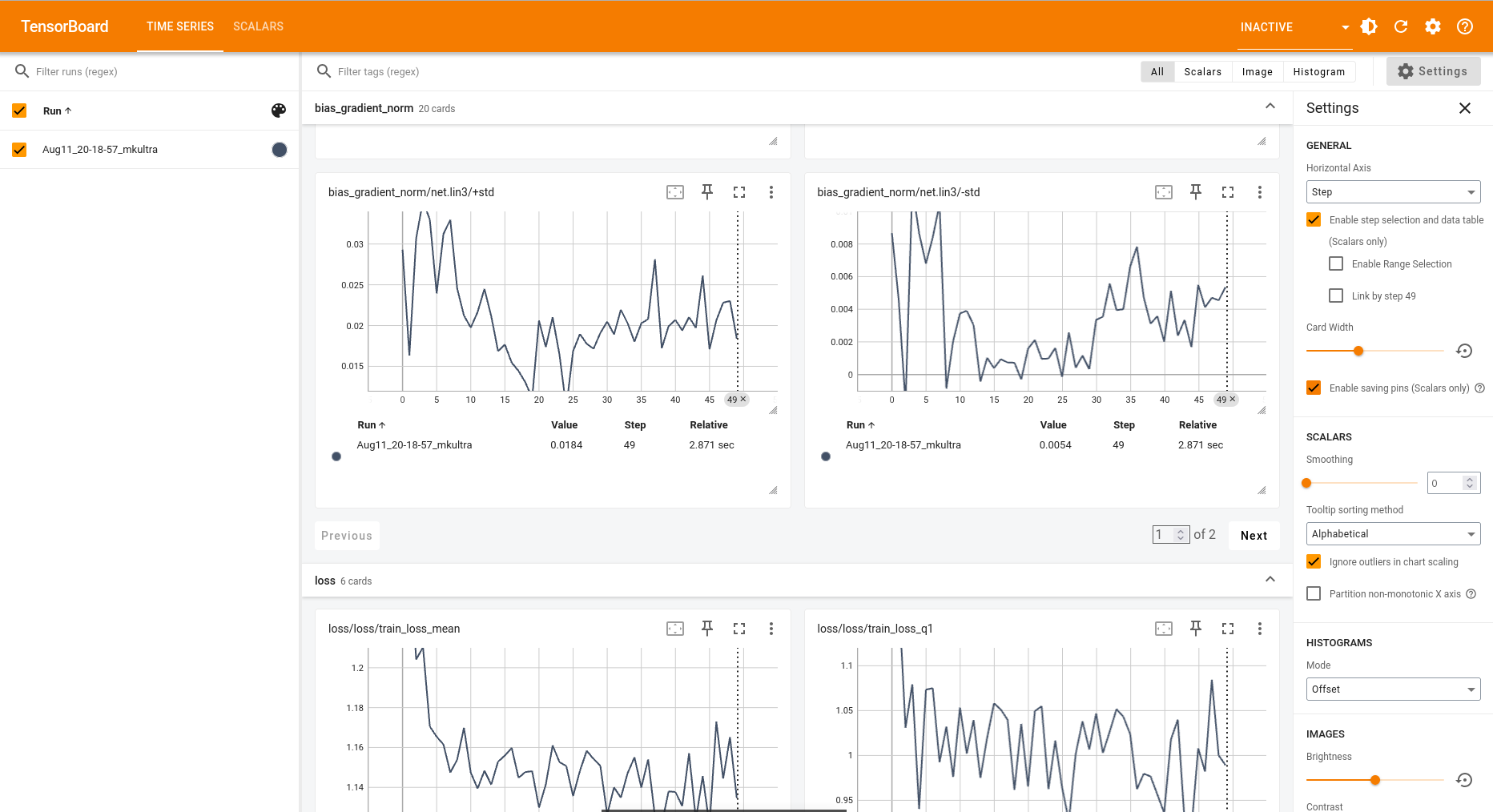
TensorBoard example#
Be aware that TensorBoard provides much smaller subset of plotting options, than Matplotlib does, so band plots are split into upper and lower bound, while relation plots create new “runs” for every subtag (i.e. layer).
Next Steps#
Try monitorch on your favourite dataset.
Take a look at other demonstration notebooks and documentation.
Find what lenses expose problem with neural networks that you encounter.